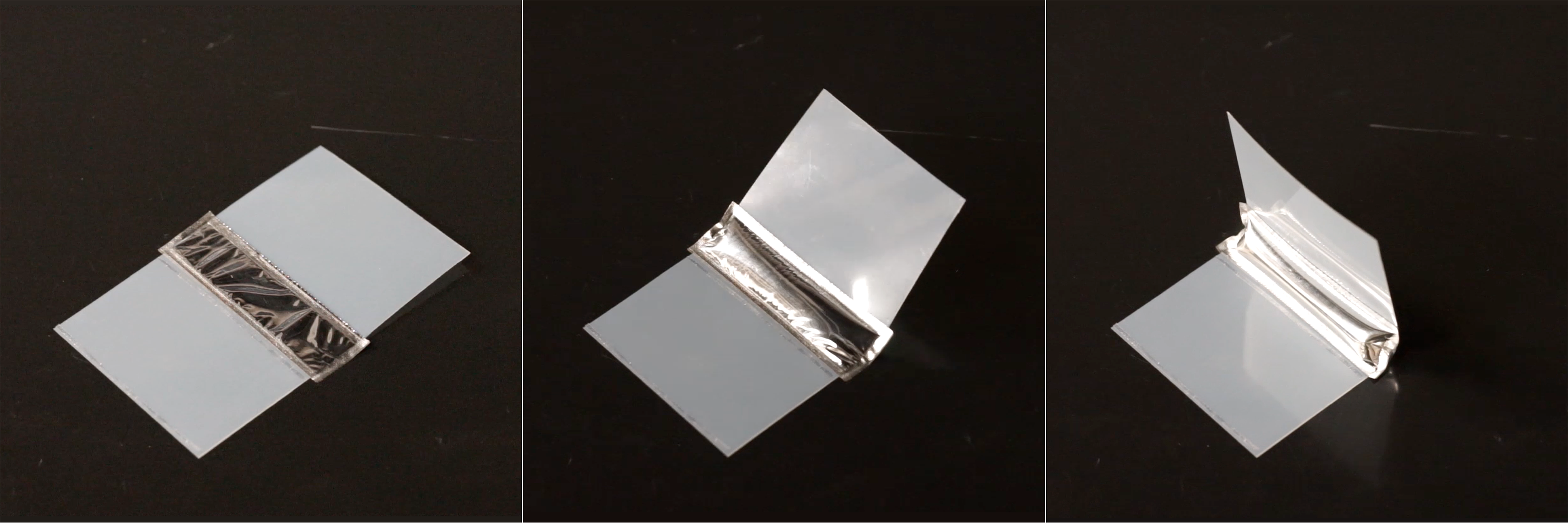
Conventional planar pneumatic actuators have not been able to make the most of their thin, lightweight, and flexible nature due to tubes and pumps inevitably connected to them. Building upon our prior work, we propose Liquid Pouch Motors, a family of printable soft actuators that consist of one or more gas-tight bladders (called pouches) filled with low boiling point liquid. When the heat over 34 °C is applied to them, the liquid inside the pouch evaporates and the whole structure inflates. Especially, we newly presented roll-to-roll mass production of Liquid Pouch Motors with the rectangular form factor in addition to the previously reported CNC heat drawing. We also discussed the suitable material selection and the volume of liquid needed for the actuators. Based on this fabrication procedure, we evaluated the mechanical properties of the proposed actuators.
By leveraging the benefits of the actuators, we then implemented three shape-changing interfaces: (1) electrically driven printable paper robots combined with printed paper circuit; (2) an untethered architecture facade that passively actuates by ambient heat; and (3) dresses that change their color and texture by the incident light and the body temperature. We believe that Liquid Pouch Motors will work as a new toolbox for the fabrication and application of soft actuators in interactive scenarios
Selected Publication
Koya Narumi, Hiroki Sato, Kenichi Nakahara, Young ah Seong, Kunihiko Morinaga, Yasuaki Kakehi, Ryuma Niiyama, and Yoshihiro Kawahara, "Liquid Pouch Motors: Printable Planar Actuators Driven by Liquid-to-Gas Phase Change for Shape-Changing Interfaces," IEEE Robotics and Automation Letters ( Volume: 5, Issue: 3, July 2020). https://doi.org/10.1109/LRA.2020.2983681
Koya Narumi, Hiroki Sato, Kenichi Nakahara, Young ah Seong, Kunihiko Morinaga, Yasuaki Kakehi, Ryuma Niiyama, and Yoshihiro Kawahara, "Liquid Pouch Motors: Printable Planar Actuators Driven by Liquid-to-Gas Phase Change for Shape-Changing Interfaces," IEEE Robotics and Automation Letters ( Volume: 5, Issue: 3, July 2020). https://doi.org/10.1109/LRA.2020.2983681